9
0
324
管理员
第五个关节正常回零后应该长这样:
<img src="https://enpei-md.oss-cn-hangzhou.aliyuncs.com/202503131614913.png?x-oss-process=style/wp" style="zoom:50%;" />
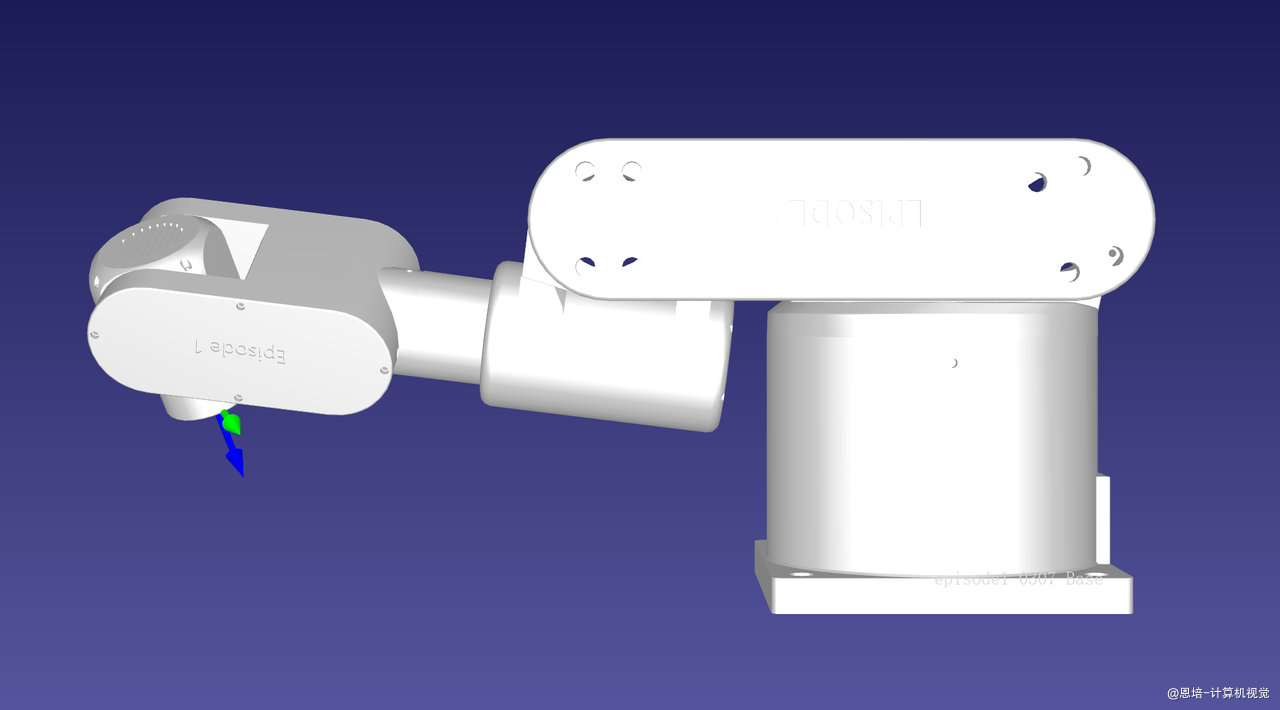
然后使用上位机,回到默认位置后,应该长这样(水平垂直):
<img src="https://enpei-md.oss-cn-hangzhou.aliyuncs.com/202503191528377.png?x-oss-process=style/wp" style="zoom:50%;" />
因为机械臂的关节都是从0位往后运动的,如果你的关节回零不到位,那么回到默认位置后可能长这样(不水平):
<img src="https://enpei-md.oss-cn-hangzhou.aliyuncs.com/202503182110551.png?x-oss-process=style/wp" style="zoom:50%;" />
可能原因:
同步带或者第五个电机的同步轮打滑,导致运动角度不充分。
因为阻力过大,5号关节回零提前回零了(提前达到你设置的阈值电流),导致参考零点变化,后续转动角度都异常。
你可以参考 二、Episode1 调试校准教程 中提前回零的办法解决。这里再简述一下:
降低物理摩擦力,你可以手动转动关节,感受一下是否摩擦力过大。松两侧螺丝,然后用手往两侧瓣:
<img src="https://enpei-md.oss-cn-hangzhou.aliyuncs.com/20260611163955096.png?x-oss-process=style/resize" style="zoom:50%;" />
修改回零电流,可以调大一些,比如调节到1000
<img src="https://enpei-md.oss-cn-hangzhou.aliyuncs.com/202503281749421.png?x-oss-process=style/wp" style="zoom:50%;" />
使用道具 举报
本版积分规则 发表回复
恩培-计算机视觉 ( 浙ICP备2023008942号 )
GMT+8, 2026-7-29 14:12 , Processed in 0.284713 second(s), 21 queries .
Powered by Discuz! X3.4
© 2001-2023 Discuz! Team.




 发表于 2026-6-11 16:42:51
发表于 2026-6-11 16:42:51
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}