[toc]
一、资料下载
| 类型 |
版本 |
下载地址 |
功能 |
新版本更新点 |
| USB2CAN驱动 |
/ |
Windows / Macos / Linux |
/ |
|
Episode1 校准测试软件 |
V 0.9.4 |
Windows / Ubuntu |
角度读取设置回零参数顺序回零检查相电流修改单个电机回零参数夹爪控制测试旋转 |
1.第5号电机放行1000ma回零电流 |
Episode1 上位机软件 |
V 0.9.9 |
Windows / Macos / Ubuntu / Jetson Xavier / RK3588 |
IP、端口设置USB ID设置TCP API服务恢复模式Robodk启用位置、关节角显示运行日志 |
支持VLA遥操作 |
| Episode1 RoboDK驱动 |
V 1.1 |
点击下载 |
支持IP、端口支持MoveJ支持MoveL支持示教 |
兼容新上位机 |
| Episode1 RoboDK机器人建模文件 |
V 1.0 |
点击下载 |
/ |
|
| Episode1 RoboDK参考案例 |
V1.0 |
点击下载 |
/ |
|
| 二次开发SDK Demo(Python) |
V1.2.1 |
点击下载 |
急停角度模式位置模式直线模式欧拉角模式负压吸盘二指舵机夹爪自由移动获取角度Robodk孪生同步 |
增加获取位姿 |
| 二次开发SDK Demo(C++) |
V1.1 |
点击下载 |
同上 |
|
| URDF文件 / ROS2 Ubuntu 包 |
V1.0 |
点击下载 |
X86 64 位Ubuntu 24.04 jazzy ros2 、Jetson xvaier ubuntu 20.04 foxy ROS2 均测试通过 |
|
二、机械臂参数
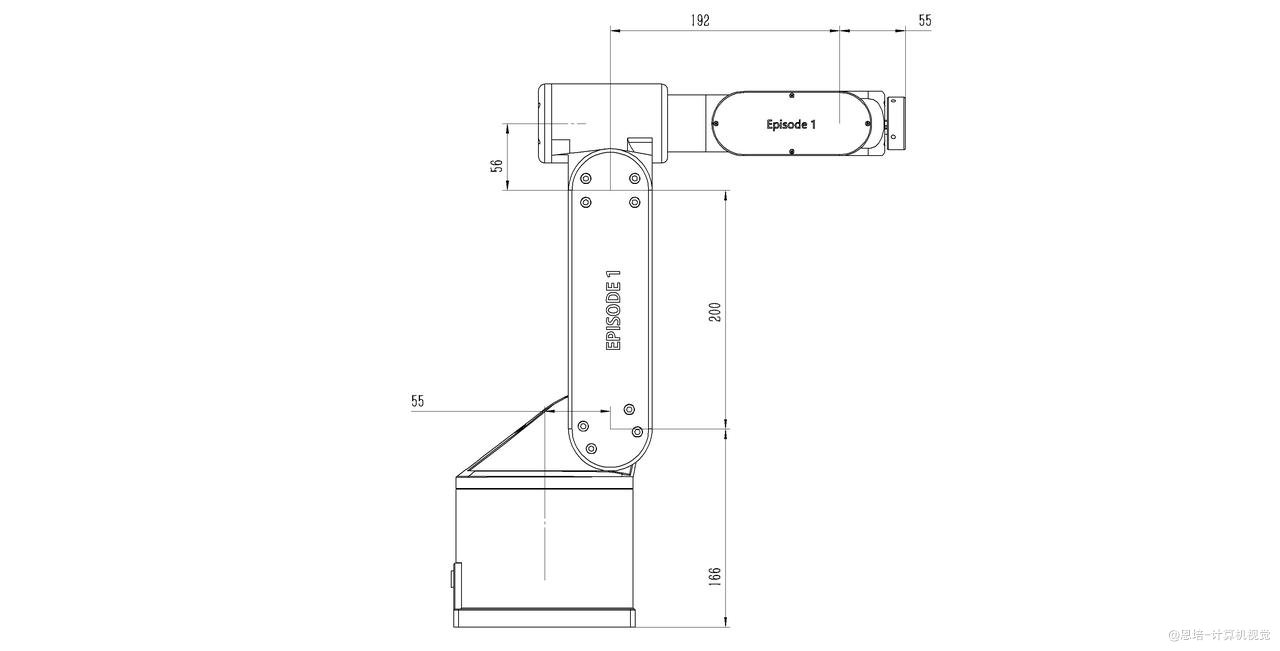
2.1. 机械臂本体参数
2.2 末端夹爪系统参数

2.2.1. 负压吸盘夹爪
- 驱动方式:负压真空吸附
- 控制单元:基于 STM32 主控
- 通讯协议:CAN 总线控制
- 额定负压吸力:-0.04Mpa
- 电源输入:12 V DC
2.2.2. 二指舵机夹爪
- 驱动方式:高扭矩 25 KG·cm 数字舵机
- 控制单元:基于 STM32 主控
- 通讯协议:CAN 总线控制
- 舵机电压范围:6~7.4 V DC
2.2.3. 通用夹具接口
- 末端法兰盘孔位 M3×4,直径 44 mm,安装尺寸点击下载
3. 软件系统
- 上位机控制软件:实时监控 / API服务/ 手动控制 / 回零校准 / 拖拽示教
- 校准软件:支持视觉标定、机械手眼标定
- 仿真软件支持:RoboDK 官方模型,支持 ROS + MoveIt 仿真环境
4.开发者 SDK 支持
- 通信协议:TCP 协议
- API 支持语言:Python、C++、C#、Java
- 提供运动模式接口:
- MoveJ(关节角度运动)
- MoveL(直线插补运动)
- 坐标位置模式(笛卡尔空间控制)
- 欧拉角模式(姿态调节)
- 免费提供丰富 Demo 示例代码:
- 视觉手眼标定
- 3D 点云自动抓取
- 6D 位姿捕获抓取
- ROS2包
三、SDK API介绍
<font color="red">先更新上位机到V 0.9.1以上</font>
<font color="red">先更新上位机到V 0.9.1以上</font>
<font color="red">先更新上位机到V 0.9.1以上</font>
下面介绍如何使用客户端发送指令给服务器来控制机械臂。每条指令都封装为一个json格式数据,通过 TCP 连接发送给服务器,服务器解析指令后返回执行结果。下文列出了各个指令的用途、参数说明和示例。
完整示例代码在上方资料表格中下载。
3.1. emergency_stop
用途
急停或解除急停操作。
参数
返回值
- 固定返回
0.05(单位:秒),建议客户端等待此时间后再发送下一条指令。
示例代码
command = {
'action': 'emergency_stop',
'params': 1 # 1 表示急停;0 表示解除急停
}
result = client.send_command(command)
print("响应结果:", result)
3.2. angle_mode
用途
通过角度模式控制电机运动,使电机移动到指定的关节角度。
参数
- 第一个参数:各电机目标角度的列表(例如
[10, 20, 30, 40, 50, 60])。
- 第二个参数:运动速度比例(浮点数,范围 0~1,默认 1,超过该范围会自动截断)。
返回值
0:表示所有电机均不需要转动-1:表示电机角度求解无解>0:表示有解,返回预计运动时间(单位:秒),建议客户端等待该时间后再发送下一条指令
示例代码
command = {
'action': 'angle_mode',
'params': ([10, 20, 30, 40, 50, 60], 0.8) # 角度列表和速度比例
}
result = client.send_command(command)
print("响应结果:", result)
3.3. move_xyz_rotation
用途
通过 XYZ 坐标和欧拉角控制电机运动,采用普通位姿模式。
参数
列表格式,共 8 个参数:
-
前3个:目标三维空间位置
xyz
-
后3个:欧拉角,默认 [90,0,180]
-
如旋转顺序选择为 "xyz",则为
- 绕 X 轴旋转角度
- 绕 Y 轴旋转角度
- 绕 Z 轴旋转角度
-
如旋转顺序选择为 "zyx",则为
- 绕 Z 轴旋转角度
- 绕 Y 轴旋转角度
- 绕 X 轴旋转角度
-
最后2个:
rotation_order:旋转顺序(默认 "zyx",支持 "zyx" 或 "xyz")speed_ratio:运动速度比例(浮点数,0~1,默认1,超过该范围会自动截断)。
返回值
-1:表示 IK 无解>0:表示有解,返回预计运动时间(单位:秒),建议客户端等待该时间后再发送下一条指令
示例代码
command = {
'action': 'move_xyz_rotation',
'params': [100, 200, 300, 10, 20, 30, "zyx", 0.9]
}
result = client.send_command(command)
print("预计运动时间:", result)
3.4. move_linear_xyz_rotation
用途
采用直线模式,通过 XYZ 坐标和欧拉角控制电机运动。直线模式下无法调整速度,运动过程中服务器会先返回运动时间再执行运动操作。
参数
列表格式,共 7 个参数:
-
前3个:目标三维空间位置
xyz
-
后3个:欧拉角,默认 [90,0,180]
-
如旋转顺序选择为 "xyz",则为
- 绕 X 轴旋转角度
- 绕 Y 轴旋转角度
- 绕 Z 轴旋转角度
-
如旋转顺序选择为 "zyx",则为
- 绕 Z 轴旋转角度
- 绕 Y 轴旋转角度
- 绕 X 轴旋转角度
-
最后1个:
rotation_order:旋转顺序(默认 "zyx",支持 "zyx" 或 "xyz")
返回值
-1:表示 IK 求解无解>0:表示有解,返回预计运动时间(单位:秒),建议客户端等待该时间后再发送下一条指令
示例代码
command = {
'action': 'move_linear_xyz_rotation',
'params': [100, 200, 300, 10, 20, 30, "xyz"]
}
result = client.send_command(command)
print("预计运动时间:", result)
3.5. gripper_on
用途
启动负压吸盘抓取操作。
参数
无
返回值
- 固定返回
0.05(单位:秒),建议客户端等待该时间后再发送下一条指令
示例代码
command = {
'action': 'gripper_on'
}
result = client.send_command(command)
print("响应结果:", result)
3.6. gripper_off
用途
负压吸盘释放操作。
参数
无
返回值
- 固定返回
0.05(单位:秒),建议客户端等待该时间后再发送下一条指令
示例代码
command = {
'action': 'gripper_off'
}
result = client.send_command(command)
print("响应结果:", result)
3.7. servo_gripper
用途
通过舵机控制夹爪角度。
舵机由0度增大后,夹爪会抓紧:
- 上电3秒后,夹爪会自动复位至90°位置 - 请勿将手放入
- 避免长时间堵转(超过1分钟):
- 空载时:保持夹爪轻微接触即可(建议最大开合角度95-105°)
- 抓取时:接触物体即会产生堵转,请勿持续紧握
参数
angle(整数):设置夹爪的角度,范围是:0~110,超过会自动截断
返回值
- 固定返回
1(单位:秒),建议客户端等待该时间后再发送下一条指令
示例代码
command = {
'action': 'servo_gripper',
'params': 45.0 # 例如设置夹爪角度为 45 度
}
result = client.send_command(command)
print("响应结果:", result)
3.8. robodk_simu
用途
控制 Robodk 同步模拟开关。注意开启模拟后机械臂会进入自由运动状态,需要提醒用户准备好托举。
需要保证机械臂在RoboDK中的节点是 episode1 0307
<img src="https://enpei-md.oss-cn-hangzhou.aliyuncs.com/202503202203763.png?x-oss-process=style/wp" style="zoom:33%;" />
参数
返回值
- 固定返回
0.05(单位:秒),建议客户端等待该时间后再发送下一条指令
示例代码
command = {
'action': 'robodk_simu',
'params': 1 # 1 表示开启模拟,0 表示关闭模拟
}
result = client.send_command(command)
print("响应结果:", result)
3.9. set_free_mode
用途
设置电机自由模式。注意:在进入自由模式前需要提醒用户准备好托举。
参数
返回值
- 固定返回
0.1(单位:秒),建议客户端等待该时间后再发送下一条指令
示例代码
command = {
'action': 'set_free_mode',
'params': 1 # 1 进入自由模式;0 退出自由模式
}
result = client.send_command(command)
print("响应结果:", result)
3.10. get_motor_angles
用途
获取当前电机的角度信息。
参数
无
返回值
- 返回一个长度为 6 的角度列表(单位:度)。
- 注意:由于 CAN 总线阻塞(如同时有其他控制指令的时候),有时部分电机角度读取可能失败,此时返回
None。
示例代码
command = {
'action': 'get_motor_angles'
}
result = client.send_command(command)
print("当前电机角度:", result)
3.11. get_T
用途
获取当前机械臂的姿态齐次变换矩阵T
参数
无
返回值
- 返回一个长度为 4x4 的的array。
- 注意:由于 CAN 总线阻塞(如同时有其他控制指令的时候),有时部分电机角度读取可能失败,此时返回
None。
示例代码
command = {
'action': 'get_T'
}
result = client.send_command(command)
print("当前T:", result)
3.12. get_pose
用途
获取当前机械臂的位置和欧拉角
参数
旋转顺序:zyx或 xyz
返回值
- 返回一个长度为6的list,分别是位置坐标和欧拉角
- 注意:由于 CAN 总线阻塞(如同时有其他控制指令的时候),有时部分电机角度读取可能失败,此时返回
None。
示例代码
command = {
'action': 'get_pose',
'params': 'xyz'
}
result = client.send_command(command)
print("位置和欧拉角:", result)
3.13 使用方式
- 建立连接
确保客户端已正确初始化并设置了服务器的 IP 和端口号。
- 构造命令
根据需要使用上述指令中的任意一种,构造一个包含
action 和(可选)params 的json数据。
- 发送命令与接收结果
调用客户端的
send_command 方法发送命令,服务器会返回一个结果。返回的数值通常代表预计运动时间,客户端应等待对应时间后再发送下一条指令。
- 异常处理
若返回值为
None,请检查网络连接或指令参数是否正确。




 发表于 2025-3-13 09:27:47
发表于 2025-3-13 09:27:47















{kind=link}
{kind=link}